This year, Our team decided to adapt our robot model from last year. Our robot is designed with flat front and back bumpers for squaring up. this allows us to attach our attachments. We have side bumpers that support our axles and allow us to slide along the wall.
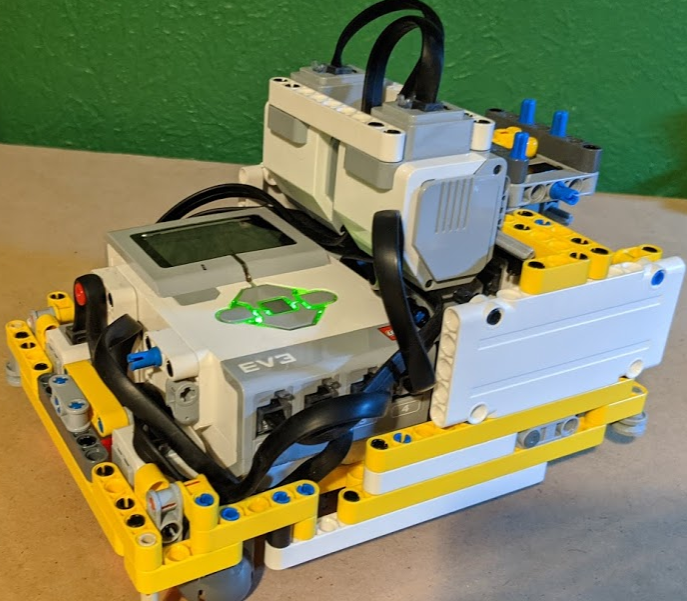
We use a color sensor, a touch sensor, and 2 gyro sensors. One for navigation and the other as a tilt sensor to let us know when we reach the top of the ramp.